일경컨스트럭션_2022/03/28_자율주행 덤프트럭 공동 개발
日経コンストラクション
요약
Nikkei Construction_2022.3.28 NEWS 기술 (p17)
자율주행 덤프트럭 공동 개발
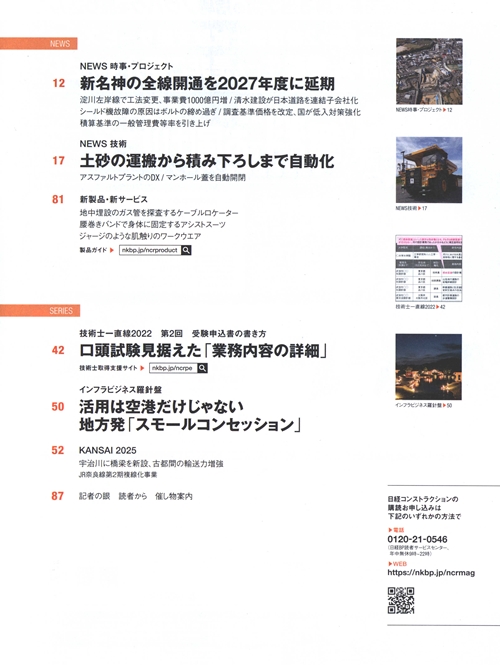
다이세이건설ㆍ고마쓰, 토사의 운반에서 하역까지 자동화
다이세이(大成)건설과 고마쓰는 토사 운반에서 하역까지 자동화한 덤프트럭 T-iROBO Rigid Dump를 공동으로 개발했다. 숙련된 운전자가 타고 한 번 조종하면 차량이 통과한 위치와 방위, 속도 등을 기록해 같은 경로를 주행할 수 있다. 2022년 1월에 미에(三重) 현의 실험장에서 성능 및 안전성을 확인했다. 2022년도에 국내 현장으로의 도입을 목표로 한다.
고마쓰가 제작한 리지드 덤프 트럭에, LiDAR(라이더) 및 카메라, GNSS(위성측위시스템) 방위계, 통신기기, 컴퓨터를 탑재했다. GNSS 방위계의 데이터를 바탕으로 자율주행 프로그램을 생성. 컴퓨터에서 차량으로 전기 신호를 전송해 제어한다. 실증에서는 주행 위치의 오차를 평균 10cm로, 커브에서도 최대 1m미만으로 억제되는 것을 확인했다.
자율주행 프로그램 작성 시 경로 형상에 따라 속도를 조절한다. 직선으로는 최대 시속 30km로 달린다. 일반적인 유인 주행보다 빠르며, 되돌리기 등 복잡한 조종이 필요한 장소에서 시간이 걸려도, 전체의 작업시간을 억제할 수 있다.
차량이 토사의 적재나 하역 장소에 도달하면, 다른 중장비와 연계한 주행 상태로 바뀐다. 토사를 굴착하는 포크레인과 전압롤러의 위치정보를 바탕으로 목표 지점을 산출하여 저속으로 이동한다. 시공 단계에 따라 토사의 적재나 하역 위치가 바뀌어도 주행 루트를 재설정할 필요가 없다.
-- 끝 --
Copyright © 2020 [Nikkei Construction] / Nikkei Business Publications, Inc. All rights reserved.
목차