- 일경 모노즈쿠리_2017/05_인간과 로봇의 2인 3각 공장日経 ものづくり
-
- 저자 : 日経BP社
- 발행일 : 20170501
- 페이지수/크기 : 122page/28cm
요약
Nikkei Monozukuri_2017.5. 특집요약 (p36~58)
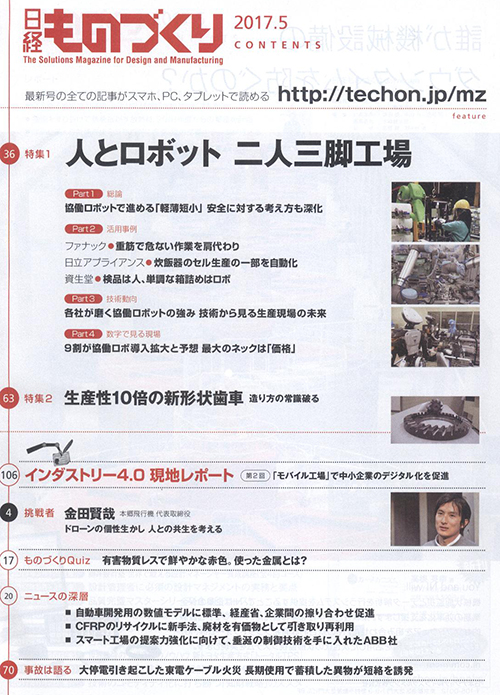
인간과 로봇의 2인 3각 공장
협동로봇 등장, 새로운 공장의 모습
다품종 소량 생산에 있어서 자동화의 다음 단계는 안전책 없이 사용할 수 있는「협동 로봇」이며, 이에 대한 기대가 높아지고 있다. 공간을 적게 사용하면서 설치할 수 있는 협동로봇이라면, Line Layout을 크게 변경하지 않고도 작업자의 근처에서 부품을 조립하거나 무거운 작업을 핸들링하는 작업 등을 시킬 수 있기 때문이다. 국제 규격이나 법규 개정으로 속속 새로운 협동로봇이 등장하면서 생산현장에서의 활용도 시작되었다. 사람과 로봇이 같은 공간에서 2인 3각으로 작업을 한다. 그러한 새로운 공장의 모습이 등장하기 시작하였다.
Part 1. 총론
협동로봇으로 추진하는「경(輕)∙박(薄)∙단(短)∙소(小)」 -- 안전에 대한 사고방식도 심화
사람 곁에서 작동할 수 있는 협동로봇이 생산현장에서 활약하기 시작하였다. 기존에는 산업용 로봇을 사용하는 기업은 제품의 대량생산을 주요 목적으로 생산현장에 로봇을 도입하여 왔다. 그러나 선진국에서는 노동인구의 감소나 유연한 생산이 필요한 다품종 소량생산에 대한 대응 등을 배경으로, 사람과 함께 작업하는 로봇이 필요하게 되었다. 일부 해외기업은 현장의 변화를 파악하여, 협동로봇을 한발 먼저 제품화하였다. 일본에서도 2015년에 시행된 일본공업규격(JIS)의 제정 및 개정을 계기로 하여 국내 로봇제조업체가 제품을 투입하기 시작하였다. 지금까지의 산업용 로봇과는 다른 성질을 갖고 있는 협동로봇. 이 새로운 설비를 이용함으로써 생산현장이 크게 변하려 하고 있다.
● 협동로봇의「경(輕)∙박(薄)∙단(短)∙소(小)」
|
「경(輕)」 |
작업부하 및 위험성 경감 |
FANUC: 중량의 물건에 대한 운반 부하 경감 |
|
독일 BMW: 작업자의 손가락 끼임 방지 |
||
|
「박(薄)」 |
로봇과의 관계가 희박한 |
Yoshinoya: 주방에서 식기 정리 |
|
「단(短)」 |
단기간에 도입 |
Hitachi Appliances: 단기간에 작은 생산 공간에서의 Cell생산 실현 |
|
「소(小)」 |
생산공간 작게 활용 |
Hitachi Appliances: 상동(上同) |
|
Shiseido: 성(省)공간에서의 상자 포장 공정 |
-- 안전에 관한 국제 규격 제정이 계기 --
-- 파트너로서 작업 부하 경감 --
-- 설치 면적이나 도입 기간 등 억제 --
-- 식기 정리 지원 --
-- 중소기업에서도 도입 추진 가능성 --
-- 작업자와 로봇의 협조 안전 모색 --
Part 2. 활용사례
● FANUC: 「경(輕)」
중량물건 운반과 위험한 작업 대체
FANUC의 본사 부지 안에 있는 사출성형기「ROBOSHOT」을 제조하는 공장의 한편에서, 동사(同社)의 무거운 물건을 운반하는 협동로봇「CR-35iA」가 활약하고 있다. 볼스크류에 베어링 부품을 압입(indentation)하는 작업으로, 여성 작업자의 파트너로 작업하고 있다.
「자동화나 작업 부하의 경감, 안전이라는 관점에서 무언가 좋은 방법이 없을까 하고 고민하고 있었다. 때마침 협동로봇이 실용화되었고, 이를 활용하면 해결할 수 있을 것이라 생각하여 도입하였다」(FANUC의 생산기술본부장인 고사카(小坂) 씨).
-- 사람의 작업과 동시 병행 --
-- 여성 혼자서 작업 가능 --
-- 큰 설비 개수 없이 실현 --
● Hitachi Appliances: 「경(輕)」「단(短)」「소(小)」
밥솥의 Cell 생산 일부를 자동화
「사람에 의한 Cell 생산방식의 생산성 개선에 한계를 느끼고 있었다. 그러나 이 협동로봇의 도입으로 생산성이 높아졌다」(Hitachi Appliances 생산기술그룹 총괄기사인 야나세(柳瀬) 씨).
Hitachi Appliances(본사는 도쿄)는, 덴마크 Universal Robots(이하, UR사)의 협동로봇「UR10」을 다가(多賀)공장(이바라키 현)에 도입하였다. 2대의 UR10을 이용하여, 가정용 밥솥「Ohitsu Gozen」(모델명: RZ-WS2M)의 내부 뚜껑을 만들고 있다. 이전에는 2명의 작업자가 Cell 생산으로 동(同) 밥솥의 내부 뚜껑을 조립했었다. 작업 효율을 높이기 위해 개선 활동을 했지만, 수작업으로는 한계가 보이기 시작했다. 그래서 생산성 향상을 목표로 하는 것과 동시에 생산 공간을 작게 하기 위해 협동로봇을 도입했다고 한다.
그때까지 사람이 작업하고 있었던 현장에 전용 자동기를 도입하자, 안전책 설치가 필요하게 되면서 생산라인이 길어져 버렸다. 또한 큰 레이아웃 변경도 동반하기 때문에 가동에 긴 시간이 필요하였다. 그래서 주목하게 된 것이 안전책 없이 이용할 수 있는 협동로봇이었다. 기존의 사람에 의한 Cell 생산 수준으로 공간을 억제하면서, 4개월이라는 단시간에 자동화 라인을 설치할 수 있었다.
-- 3개의 스테이션에서 조립 --
-- 협동로봇 이용에 제품설계 측도 협력 --
● Shiseido: 「경(輕)」「소(小)」
제품 검사는 사람, 단순 작업인 상자 포장은 로봇
시세이도의 가케가와(掛川)공장(시즈오카 현)의 메이크업 제품 조립 공정에서, 2017년 3월부터 양팔 협동로봇「NEXTAGE」가 가동을 시작하였다. 파운데이션 등의 분말화장품의 Cell 생산공정에 있어서, Cell 안의 작업자 바로 옆에서 2대의 NEXTAGE가 상자 포장 작업을 한다.
-- 노동력 부족을 대비하여 자동화 --
-- 사람을 닮은 모양이라 받아들이기 쉽다 --
-- 브랜드에 대한 긍지는 사람이 담보 --
Part 3. 기술동향
각 사가 주력하는 협동로봇의 강점 -- 기술을 통해 보는 생산현장의 미래
각 로봇제조업체는 다양한 아이디어를 협동로봇에 응용하고 있다. 그래서「사람과 유사한 양팔」「중량/경량의 물건에 대응」「현장에서의 유연성」「독자적인 안전설계」「간단한 티칭」이라는 5개의 시점에서 주요 협동로봇의 특징을 탐색한다. 동시에「가능성을 높이는 주변 기술」을 통해, 협동로봇이 장래의 생산현장에서 어떠한 역할을 담당할 수 있을지에 대한 가능성을 살펴보자.
● 기술동향 ① : 사람과 유사한 양팔
기업이 협동로봇을 도입하는 목적의 하나는, 사람이 실시하는 단순한 작업을 대체하는 것이다. 그를 위해 일부의 로봇제조업체는 사람과 유사한 동작을 목표로 하여 양팔을 가진 협동로봇을 개발하고 있다. 2개의 팔을 갖춘 양팔형은 단팔형과 비교하여 팔이 차지하는 설치 면적이 작아도 된다. 활용방법에 따라서는 공간을 절약하는데 크게 공헌할 것이다. 여기서는 대표적인 3개의 양팔형 협동로봇의 특징에 대해 소개한다.
-- 14개의 축으로 높은 자유도 실현 --
-- 고정 전용 지그(Jig)를 가능한 배제 --
-- 사람과 유사한 모양으로 압박감 없이 작업 --
● 기술동향 ② : 중량/경량의 물건에 대응
많은 협동로봇이 운반할 수 있는 질량은 수 kg~십 수 kg인데 반해,「CR-35iA」는 운반 가능 무게가 35kg으로 월등하게 뛰어나다. 자동차회사나 기계제조회사 등에서 크고 무거운 작업 공정에서 이용할 수 있을 것으로 예상하고 있다. 튼튼한 안전책을 설치하지 않아도 되며, 또한 공간을 절약하면서 크고 무거운 작업을 경감할 수 있다.
원래 협동로봇의 운반 가능 질량을 한정하는 이유는, 무거운 작업인 만큼 사람과 부딪혔을 경우에 위험성이 높아지기 때문이다. 모터 출력이 크기 때문에 부딪혔을 때에 발생하는 작은 힘을 검출하는 것도 어렵다. FANUC은 이 문제를 전용 역각센서(Force Sensor)를 자사에서 개발하는 방법을 통해 해결하였다.
「센서의 분해능이 좋지 않으면, (부딪혔을 때에) 멈출 때까지의 시간이 길어진다. 중량의 물건을 운반하는 로봇에 있어서 안전성을 담보할 수 있는 분해능을 보유한 역각센서가 없었기 때문에, 협동로봇을 위해 개발하였다」(FANUC 로봇사업본부장인 이나바(稲葉) 씨). FANUC은 지금까지도 로봇에 내장하는 센서를 자사에서 개발하고 있었으며, CR-35Ia의 제품화에서도 축적된 이 기술을 활용하였다고 한다.
CR-35iA에는 다른 로봇과 크게 다른 점이 하나 있다. 대부분의 협동로봇이 신규 설계인데 반해, CR-35Ia는 기존의 산업용 로봇이 바탕이 되었다는 점이다. 실적이 있는 기능이나 시장에서 축적되어 온 신뢰성 등을 모두 투자한 협동로봇을 전개할 생각이다.
-- 자중(自重) 3.8kg의 데스크탑 형 --
● 기술동향 ③ : 현장에서의 유연성
생산현장에 협동로봇을 도입하는 이유는, 다품종 소량생산에 대한 대응이나 작업내용의 변경은 물론, 장기적으로 활용방법이 변해도 대응할 수 있는 유연성을 갖출 수 있기 때문이다. 현재로서는 사람과 작업 영역을 분류하여 협동로봇을 이용하고 있는 경우가 많지만, 앞으로는 사람과 로봇의 작업 영역이 중복되는 이용 방법이 늘어날 것이다. 협동로봇에는 그러한 미래의 변화에 대응하는 높은 유연성 및 확장성이 점점 더 요구될 것 같다.
예를 들면, 미국의 Rethink Robotics(이하, RR사)가 개발∙생산하고 있는「Sawyer」는, 제어 소프트웨어를 업데이트함으로써 로봇의 기능을 수시로 확충하고 있다. 2017년 3월에는 팔의 끝 부분에 탑재한 카메라로 작업의 방향을 인식하여 피킹하는 기능이나, 로봇의 동작에 관한 데이터를 실시간으로 출력하는 기능 등을 추가하였다. 일본에서 Sawyer를 판매하는 스미토모중기계공업에 의하면,「이들은 타사 제품에도 있는 기능이지만, RR사는 필요하다고 생각되면 지속적으로 기능을 추가하고 있다」고 한다.
● 기술동향 ④ : 독자적인 안전설계
협동로봇이 사람과 작업 영역을 공유하는 이상, 접촉이나 충돌 등의 위험은 항상 따라다닌다. 따라서 각 로봇제작회사도 이를 충분히 배려하여 제품을 개발하고 있다. 그 중에서 유니크한 안전 설계가 이루어진 2개의 협동로봇을 소개하고자 한다.
하나는 Liferobotics(본사, 도쿄)가 개발하는 6축의「CORO」다. 로봇에서 팔꿈치에 해당하는 부분을 제거하여 작업자가 로봇의 움직임을 예측하기 쉽도록 하였다. 로봇의 팔 시작부분과 지주 사이에 있는 신축부가 주름상자(Bellows)처럼 만들어져 있어, 팔을 앞으로 뻗거나 뒤로 당길 수가 있다. 이로써 팔꿈치가 없어도 멀리 떨어져 있는 곳의 작업을 가까운 곳으로 당겨올 수 있다.
팔꿈치를 갖고 있는 로봇은 여분의 동작 공간이 생겨난다. 작업자는 End Effector는 보고 있어도, 로봇 전체의 움직임을 시야에 넣고 있는 것은 아니다. 작업자가 로봇의 움직임을 파악하기 쉽도록 “여분의 동작을 만들어 내는 팔꿈치 부분”을 제거하여 안전성을 높였다.
기존의 산업용 로봇에 대한 지식을 활용하여, 새로운 협동로봇을 개발하고 있는 곳은 YASKAWA Electric이다. YASKAWA는 2017년 안에 운반가능 질량이 10kg인「MOTOMAN HC-10」의 제품화를 계획하고 있다. HC-10은 6축의 각 관절에 역각센서를 2개 씩 탑재한 긴 구성을 채용하였다. YASKAWA 로봇기술부의 오카(岡) 씨는 안전성을 고려하여 이러한 구성으로 하였다고 설명한다.
● 기술동향 ④ : 간단한 티칭
협동로봇은 지금까지 산업용 로봇을 이용한 적이 없는 중견 및 중소기업, 3품(식품, 화장품, 의약품)업계 등에서의 활용이 기대되고 있다. 그리고 그 활용에 있어서는 작업 티칭이 과제가 된다. 시스템은 시스템 인테그레이터가 구축한다고 하더라도, 엔드유저도 간단한 티칭이나 약간의 변경∙수정을 해야 하는 일이 많다. 대부분의 협동로봇이 팔을 직접 움직여서 동작 포인트를 지정하는 다이렉트 티칭 기능을 실제 장착하고 있는 것도 이 때문이다.
또한 조작성을 연구하여, 전문가가 아니더라도 티칭할 수 있도록 만든 협동로봇을 제품화하고 있는 기업도 많다. 덴마크의 Universal Robots(이하, UR사)를 예로 들 수 있다. UR사의 야마네(山根) 매니저는,「누구나 사용할 수 있는 로봇을 콘셉트로 개발하고 있다. 시스템 인테그레이터에 의존하는 것이 아니라, 엔드유저 스스로가 티칭할 수 있다」라고, 편한 사용법에 자신감을 보인다.
-- 워드프로세스를 사용할 수 있으면 티칭 가능 --
● 기술동향 ⑤ : 가능성을 높이는 주변 기술
이미 다종다양한 제품이 등장하고 있는 협동로봇. 이 역할을 지원하는 주변 기술도 진화하고 있다. 그 하나가 역각센서(Force Sensor)다. 대부분의 협동로봇이 역각센서를 사람과의 접촉 감지에 이용하고 있다. 또한 사람을 대신하여 부품의 조립 같은 정밀한 작업을 시킬 때에도 위력을 발휘한다. 중에서도 최근에 주목을 받고 있는 것이 Seiko Epson이 개발한 수정압전(水晶壓電)방식의 역각센서「S250」시리즈다. Seiko Epson의 Robotics Solutions 사업부장인 후쿠시마(福島) 씨는,「지금까지는 불가능했던 미세한 힘을 검출하는 것이 가능해졌다」라고 그 기능에 대해 자신감을 피력하였다.
수정압전방식은 기존의 정전(靜電)용량식 디바이스나 Strain Gauge와 비교하여 강성(剛性)이 높다. 그렇기 때문에 수 마이크로미터의 미세한 디바이스의 변형을 토대로 0.1N이라는 작은 힘을 검출할 수 있으며, 노이즈에도 강하다고 한다.
-- 딱 맞는 부품을 끼우는 일도 가능 --
-- 자성유체(Ferrofluid)의 그립으로 어떤 모양도 잡는다 --
-- 비(非)자성체를 섞어 과제 해결 --
-- 끝 --
목차